

Данный пост предназначен для тех, кто уже имеет базовые навыки строительства и хочет научиться делать УРВВ в People Playground.
Этот гайд – про ракеты воздух-воздух с полностью автоматическим наведением.
База
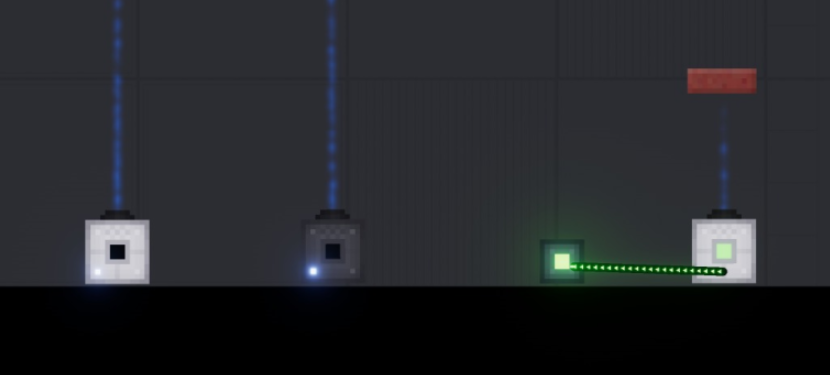
Ключевой элемент головки самонаведения (далее – ГСН) – детекторы. Они подают на подключенные провода сигнал, когда в синий луч попадает объект. Мы используем детекторы, чтобы активировать механизм доворота к цели при её обнаружении детектором.
Важные настройки детектора:
- Single/Double Trigger – поведение детектора. При Single Trigger сигнал только при обнаружении, при Double Trigger – при обнаружении и при потере цели.
- Set Range – настройка дальности луча. Максимум 25 метров, но можно увеличить запитав детектор.
- Hide/Show Beam – визуальная настройка, прячет синий луч.
Два пути создания ГСН
Есть два способа создать самонаводку:
- Несколько фиксированных лучей под разными углами;
- Один вращающийся луч.

Первый способ
Разберём на примере простейшей ракеты с самонаводкой.
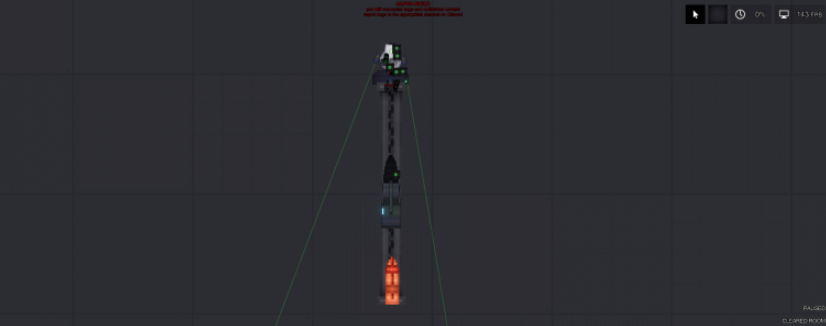
Сборка: ставим Structular Pillar и изменяем размер под желаемый, ставим в хвосте маршевый двигатель и в середине балки Industrial Gyroscope. В носу ракеты ставим два детектора, смотрящих в разные от ракеты стороны под углом примерно 45 градусов. К каждому детектору подсоединяем по пропеллеру или иному поворотному двигателю, от обоих детекторов ведём зелёные провода к гироскопу в середине балки. Ставим детекторам настройку Double Trigger. Добавляем взрывчатку и взрыватель. Готово!
Итоговая конструкция:

Если в луч ракеты попадёт цель, ракета тут же довернёт в её сторону, в этот момент датчик потеряет цель и ракета будет поддерживать курс до самой цели.
Как улучшать систему
Добавлять новые датчики, балансировать систему, повышать дальность обнаружения с помощью электричества.
Второй способ
Этот способ гораздо сложнее и требует тонкой настройки некоторой аппаратуры. Мы заставим датчик поворачиваться на роторе, останавливая своё вращение при засечении цели, а затем сделаем поворот ракеты в сторону цели.
Сборка корпуса: ставим Structular Pillar и изменяем размер под желаемый, ставим в хвосте маршевый двигатель и в середине балки Industrial Gyroscope. Готово!
Сборка ГСН: ставим ротор, уменьшаем его и убираем коллизию и вес. Размещаем по обе стороны диска ротора лазеры и ставим приёмник лазера под ротор. Назовём эту конструкцию Приёмник-А Регулируем его размеры. От приёмника лазера проводим красный провод к основанию ротора. Далее ставим обычный или серый детектор на диск ротора, ставим ему настройку Double Trigger, ведём от него красный провод к основанию ротора, а также зелёный провод к гироскопу на основании ракеты. Ставим гироскоп на диск ротора, ведём к нему от детектора зелёный провод. Последний штрих: ставим направленный вниз приёмник лазера на диск ротора, после чего ставим выключенный лазер на основание ротора. Ведём зелёный провод от детектора к лазеру и зелёный провод от приёмника к основанию ротора. Приёмнику ставим Double Trigger. Назовём эту конструкцию Приёмник-Б. Готово!
P.S. лучше использовать дистанционные провода из версии 1.28a
Крепим основание ротора к структурной балке. Должно получиться вот так:
Что тут проиходит: Ротор вращается, а Приёмник-А меняет направление его вращения, обеспечивая стабильное сканирование определённых углов. Как только детектор засекает цель, диск ротора фиксируется гироскопом, и ротор начинает наоборот вращаться вокруг детектора. Как только угол между детектором и корпусом ракеты выровняется, сработает приёмник-Б и остановит конструкцию, направляя ракету в сторону цели.
Если с первого раза ракета не заработала – это нормально! Попробуйте углубиться в её механизм и понять, что именно не работает.
Как улучшать систему
Чинить баги, уменьшать количество проводов для ускорения реакции механизма, повышать дальность обнаружения с помощью электричества.
Спасибо за прочтение! Удачи, инженеры!

